
Fermarsi o non fermarsi? E perché?
Ecco quando succede: stai risalendo da una bellissima immersione; ti avvicini alla profondità della sosta di sicurezza e ha inizio il conflitto interiore. La sola cosa che veramente vuoi è risalire in barca il più velocemente possibile (ossia “proprio adesso”, se non prima). Sarà l'acqua fredda, o il troppo caffè prima dell'immersione, o quella crema di fagioli messicani a colazione, ma il bagno della barca, per quanto sgradevole, diventa sempre più desiderabile. La lunga tappa di sicurezza probabilmente sfocerà in una disgustosa muta da pulire. La cosa più semplice sarebbe non fare la tappa, solo per questa volta. Ma le soste di sicurezza si fanno per un motivo, no? Potresti tentare la sorte e saltare la tappa? Quanto ti senti fortunato? Quanto devi essere fortunato per saltarla senza problemi?
(Questo rievoca la scena iconica del film in cui Harry Callaghan, puntando una pistola che potrebbe o no essere carica, dice: "Devi fare a te stesso una domanda: 'Mi sento fortunato?' Eh, pivello?" Nel film, il "pivello" ha informazioni sufficienti per calcolare le sue probabilità e prendere una decisione.)
Torniamo alla vita vera. Hai informazioni sufficienti per decidere sensatamente sulla sosta di sicurezza? Cosa devi sapere? Come minimo, ti servirebbe una qualche stima del rischio di malattia da decompressione (MDD) se completassi la sosta di sicurezza, e una stima del rischio se invece risalissi direttamente in superficie. Solo in quel caso potresti confrontare le probabilità e fare una scelta ragionata.
E subito cominciano i problemi. I computer subacquei oggi in uso non operano su principi di scelte ragionate o livelli di rischio accettabile, ma su un netto principio "sì/no" (ossia "Sì, puoi continuare l'immersione a questa profondità / No, non puoi continuare l'immersione a questa profondità”). E’ vero che molti computer subacquei attuali consentono di selezionare il livello di rischio, ma ciò che si sceglie è un livello relativo di rischio (“più rischioso” o “meno rischioso”). Non viene specificato da nessuna parte quale livello di rischio effettivo sia rappresentato dalle diverse impostazioni. Personalmente, trovo inutili queste categorie generiche: rispetto a certe persone che conosco sono un avventuroso amante del rischio, rispetto ad altre sono un pantofolaio con tutto il divano.
Già negli anni ottanta, il Dott. Paul Weathersby, uno scienziato della US Navy, la Marina degli Stati Uniti, aveva proposto un modello probabilistico per prevedere la possibilità di malattia da decompressione. Il modello teneva conto del fatto che, come la maggior parte dei processi naturali, lo stress decompressivo aumenta progressivamente, così che non esiste un punto al di sotto del quale tutti sono al sicuro al 100%, mentre al sopra di esso tutti avranno la MDD. Nel 1993, la Marina invitò i membri della DEMA (Dive Equipment Manufacturers Association, l’associazione di produttori di attrezzature subacquee) a partecipare a un programma di cooperazione per inserire questo algoritmo probabilistico in un computer subacqueo. Apparentemente vi fu un certo interesse, molte obiezioni e, alla fine, nessun produttore fu disposto ad aderire. Alcune delle obiezioni avevano a che fare con i microprocessori di allora, non in grado di gestire i calcoli necessari (un'altra interessante obiezione verrà trattata più sotto). Ora, quasi 20 anni e svariate generazioni di microprocessori più tardi, nei computer subacquei ancora non ci sono modelli probabilistici.
Abbiamo dunque incontrato un piccolo intoppo nel nostro processo decisionale. Forse è utile cominciare daccapo e analizzare proprio le soste di sicurezza.
Quale effetto hanno le soste sulla sicurezza delle immersioni? Facciamo un piccolo preambolo. Diversamente dalle tabelle di immersione, o dagli algoritmi che stanno alla base dei computer da immersione, la sosta di sicurezza è fondamentalmente un "add-on". Quando le immersioni si avvicinavano ai limiti di non decompressione, sembrava sensato fare qualcosa che somigliasse a una sosta di decompressione, solo come precauzione. Si diffuse l’idea che la tappa servisse a qualcosa, sebbene inizialmente non vi fosse né una prova scientifica né una vera teoria sulla quale fondarla.
La prima prova che la tappa potesse servire venne fornita da un piccolo studio con monitoraggio Doppler del Dott. Andrew Pilmani. Lo studio mostrò una significativa diminuzione delle bolle venose rilevabili, indicando la probabile utilità delle soste di sicurezza. Sfortunatamente, mentre le bolle rilevate dal Doppler sembrano avere una correlazione con la malattia da decompressione, non è una relazione molto forte. Ed eccoci così di nuovo all’idea sensata sulle soste di sicurezza, agli aneddoti della comunità subacquea sull’utilità delle soste e a una quantità limitata di prove scientifiche.
Dove si colloca la sosta di sicurezza nella teoria? O, più concretamente, nella teoria e negli algoritmi che sono alla base dei computer subacquei attuali? Tutti i computer subacquei in uso oggi, sebbene diversi tra loro in vari modi, sono strutturalmente basati sul modello decompressivo di Haldane. Il modello di Haldane implica un'utilità minima per le soste di sicurezza. Allora, come la mettiamo? Le soste di sicurezza sono solo una sorta di superstizione frutto dell’ignoranza, come toccare ferro o evitare che un gatto nero ci attraversi la strada? Oppure dobbiamo andare più a fondo per trovare le risposte?
E’ il momento di tornare all’incontro tra la Marina e la DEMA e all’interessante obiezione fatta dalle aziende produttrici riguardo l'algoritmo probabilistico proposto per i computer subacquei. I produttori non erano disposti a fare e vendere un computer che avrebbe detto ai subacquei che il loro rischio di MDD era intorno al (piuttosto inquietante) 2,5%. E chi potrebbe biasimarli? Da una parte, potrebbe spaventare i potenziali subacquei e, dall'altra , non sembra corrispondere a ciò che i subacquei vivono. Con un rischio di MDD del 2,5%, un subacqueo con 200 immersioni dovrebbe aver avuto 5 episodi della malattia e le guide subacquee, con migliaia di immersioni, avrebbero con la camera iperbarica la stessa dimestichezza che hanno con il loro bar preferito.
Rifiutare l'algoritmo della US Navy sembrerebbe quasi un’ovvietà per i produttori, se non fosse per un paio di particolari scomodi: il primo è che i dati della Marina erano basati su concrete prove sperimentali; l’altro è che i produttori di fatto utilizzano le stesse tabelle di immersione US Navy (o tabelle PADI simili) per calibrare i modelli Haldane alla base dei loro algoritmi. Se le aziende produttrici dovessero trasformare i propri algoritmi in modelli probabilistici, le loro stime del rischio di MDD sarebbe più o meno le stesse dell’algoritmo proposto dalla Marina. Non contestavano la stima del rischio; è solo che non volevano dichiararla.
Ma rimaniamo pur sempre con due stime di rischio molto diverse. Da un lato c’è la prova sperimentale di un rischio di MDD del 2,5%; dall’altro c’è l’esperienza vissuta dalla comunità subacquea, in cui le probabilità di sviluppare una MDD sono una frazione minuscola del rischio di MDD sperimentale. Ovviamente, non possono essere entrambe corrette. Oppure sì?
C'è una differenza fondamentale tra gli studi condotti dalla Marina e ciò che accade nella quotidianità del mondo della subacquea. I subacquei dello studio venivano riportati in superficie senza soste di sicurezza. In circostanze normali, le soste di sicurezza sono sempre consigliate, anche con una certa insistenza. Naturalmente, questo può fare la differenza solo se le soste sono effettivamente rispettate. Dati recenti forniti dal Project Dive Exploration (PDE) confermano quanto da noi osservato, ossia che la stragrande maggioranza delle immersioni ricreative comprende un qualche tipo di sosta di sicurezza. In particolare abbiamo visto come, su 102.642 immersioni in aria, il 95,7% delle risalite da 20m. comprenda una sosta di sicurezza – che già è buona cosa. Ma quando abbiamo ampliato un po’ la ricerca e considerato le risalite da 30m., abbiamo scoperto che un buon 99,3% comprende una qualche forma di sosta di sicurezza. Di fatto, abbiamo scoperto che, malgrado la notevole libertà lasciata dai parametri consigliati sulla sosta di sicurezza, la stragrande maggioranza delle immersioni ricreative ne comprende una. Quindi abbiamo una differenza sostanziale tra gli studi della Marina e il mondo della subacquea: le risalite dirette in superficie contro le soste di sicurezza.
L'apparente discrepanza tra i risultati della Marina e l'esperienza dei subacquei può fondarsi sulle soste di sicurezza?
Non secondo i modelli decompressivi haldaniani – il che significa non secondo gli algoritmi degli attuali computer subacquei (se la maggior parte segnala una sosta di sicurezza, è perché l'esperienza ne ha dimostrato l’efficacia, non perché il modello la preveda). Per la prima volta, c'è un nuovo modello decompressivo brevettato, non basato sulla teoria haldaniana, che predice il rischio di MDD in modo più accurato: il SAUL – Safe Advanced Underwater aLgorithm. (sì, lo so, l'acronimo non è perfetto.)
Il diagramma qui sotto mostra come ciascuno dei tre algoritmi predirebbe il rischio di MDD per una tipica immersione ricreativa senza sosta di sicurezza e per la stessa immersione con una sosta di sicurezza. Gli algoritmi utilizzati sono un tipico modello haldaniano ("Haldane"), un modello basato sul controllo delle bolle, attualmente in uso nella US Navy ("Bubble") e il modello dell'autore ("SAUL").
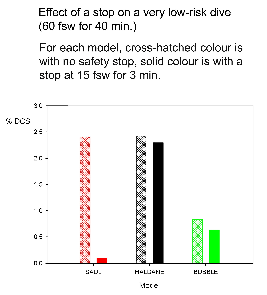
Fino a che punto possiamo rispondere alla domanda iniziale? Quanto devi essere fortunato per omettere la sosta di sicurezza? Dipende dalle specifiche dell'immersione e a quale modello ti affidi. Supponiamo che l'immersione sia quella del diagramma – 18 metri per 40 minuti.
Secondo "Haldane", non serve essere particolarmente fortunati per saltare la tappa (anche se potrebbe servirti un po’ di fortuna solo per continuare a immergerti in maniera regolare). Il rischio di MDD sarebbe del 2,3% con una tappa e del 2,5% senza – non una differenza enorme.
Secondo "Bubble", il rischio di MDD sarebbe dello 0,7% con una sosta e dello 0,9% senza. Anche in questo caso, non una differenza enorme.
Con "SAUL", omettere la tappa porterebbe il rischio da circa lo 0,1% al 2,5%. In altre parole, l'immersione senza sosta è 25 volte più rischiosa della stessa immersione con la tappa.
Allora, che cosa dovresti fare? Se pensi che l’Haldane o il Bubble siano modelli accurati, non cambia molto se questa volta salti la tappa – o, di fatto, ogni volta che ti dà fastidio. Ma se questa idea non ti piace quanto non piace a me, potresti accettare che l’idea di SAUL è corretta. Aumenteresti enormemente il livello di rischio. Potresti anche non aver conseguenze, omettendo la sosta di sicurezza solo stavolta. D'altra parte, ti sono già capitate situazioni simili e probabilmente ti capiteranno di nuovo. Se salti sempre la tappa di sicurezza, stai sicuro che avrai una MDD. Se non pensi di saltare la tappa ogni volta, perché saltarla anche una volta sola?
Che altro dovresti fare? Se pensi che SAUL sia più preciso sulle soste di sicurezza, potresti voler dare un'occhiata più da vicino al modello e saperne di più leggendo qualcuno degli articoli qui sotto o visitando uno dei siti web dell'autore.
Mentre al momento non vi è sul mercato alcun computer da immersione basato sul SAUL, stiamo collaborando con Liquivision per inserire SAUL in un computer subacqueo. Non è ancora prevista una data di lancio.
Links