The Catlin Seaview Survey Project
15 July 2012
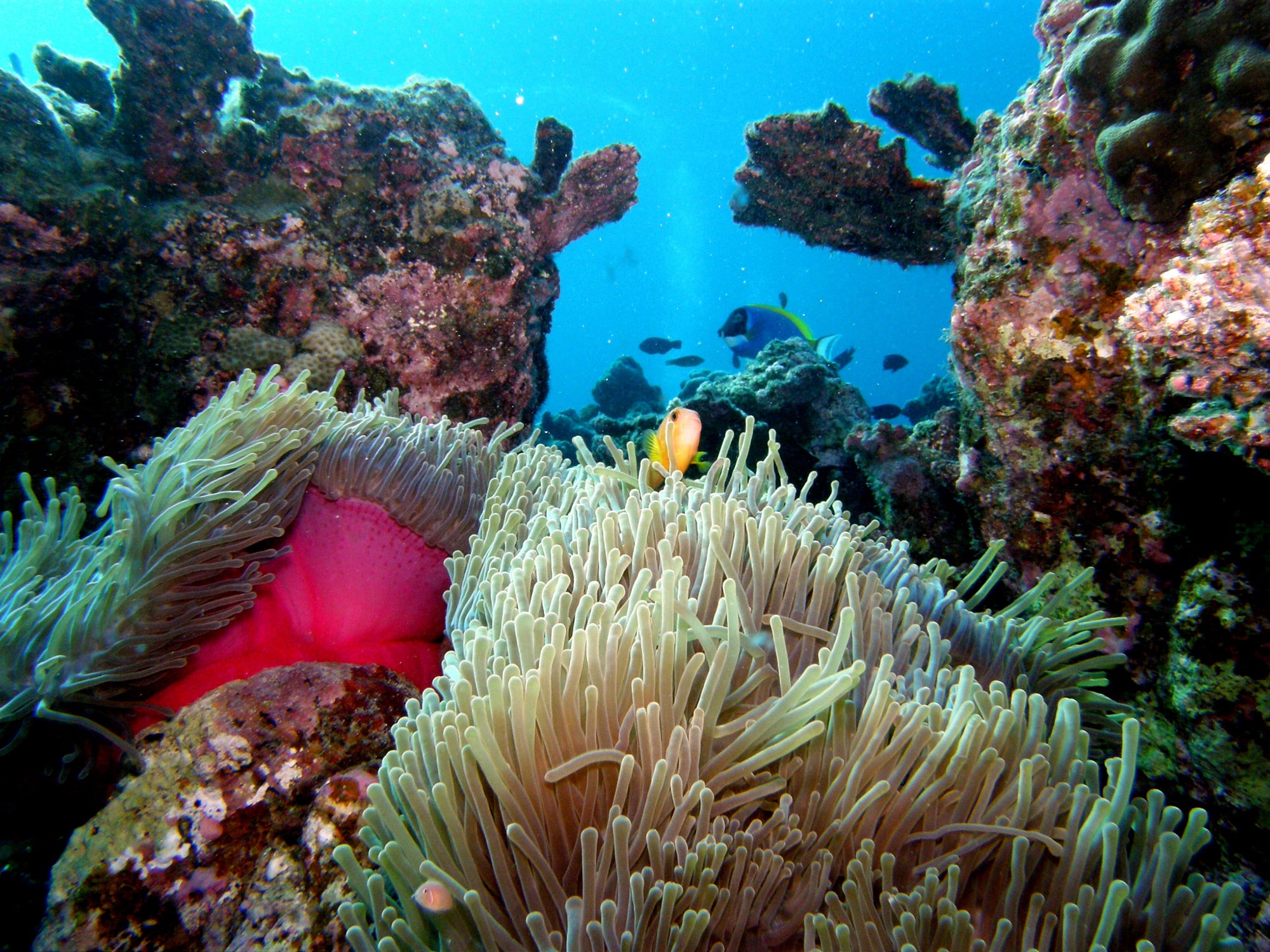
The Catlin Seaview Survey is first and foremost an important scientific expedition. It aims to carry out the first comprehensive study to document the composition and health of coral reefs on the Great Barrier Reef and Coral Sea across an unprecedented depth range (0-100m) – addressing a series of important questions regarding the changes associated with the rapidly warming and acidifying oceans.
However this is not just another scientific survey.
Usually scientific surveys don’t have the ability to really capture the public’s imagination and engage people in the science. Expeditions and their findings tend only to be fascinating to other scientists. This project is very different. The images from the expedition, when stitched together, will allow scientists and the public at large to explore the reef remotely through any device connected to the Internet. It will allow them to choose a location, dip underwater, look around and go off on a virtual dive. It has the potential of engaging people with the life and science of our oceans in a way that’s not been possible until now. It is a very exciting time.
Underwater Wi-Fi
A wireless network to control underwater robots: this is the result of an experiment which has been successfully carried out by a European research group coordinated by Andrea Caiti, of the “Piaggio” centre specialised in robotics of the University of Pisa.
“Communication under the sea” – explained Andrea Caiti in a press release from the University of Pisa – “is problematic and conditioned by varying factors, such as local oceanography, temperature, the saline content of the water, and depth. Our robots can build efficacious underwater communication networks, which can be used to create surveillance systems for limited access underwater sites – like protected marine areas or ones of archaeological interest, as well as for industrial or port facilities along the coast – whilst at the same time measuring important parameters that examine the state of the marine environment, such as water temperature, salinity and pollution”.
The final stage of the experiment took place in the Norwegian fjords using the robot, “Folaga”, that measures 2 metres in length with a diameter of 12 centimetres and weight of 30 kilograms, and to which a temperature sensor was applied.
The researchers were able to verify that the robot, navigating in the busy port area of the fjord, was capable of working autonomously, responding to commands sent from the central station. Futhermore, when testing what would happen in the case of a lost connection, the researchers found that the robot was able to reestablish contact autonomously.
Links
http://www.piaggio.ing.unipi.it/
http://www.piaggio.ing.unipi.it/index.php/research/123-robotics
http://unimap.unipi.it/cercapersone/dettaglio.php?ri=5685&template=dettaglio.tpl
http://www.dsea.unipi.it/Members/caitiw
http://www.ua-net.eu/
About the author
![]()
Dive into the latest stories,
before anyone else.
Subscribe to the
Alert Diver
newsletter.