El Catlin Seaview Survey Project
15 julio 2012
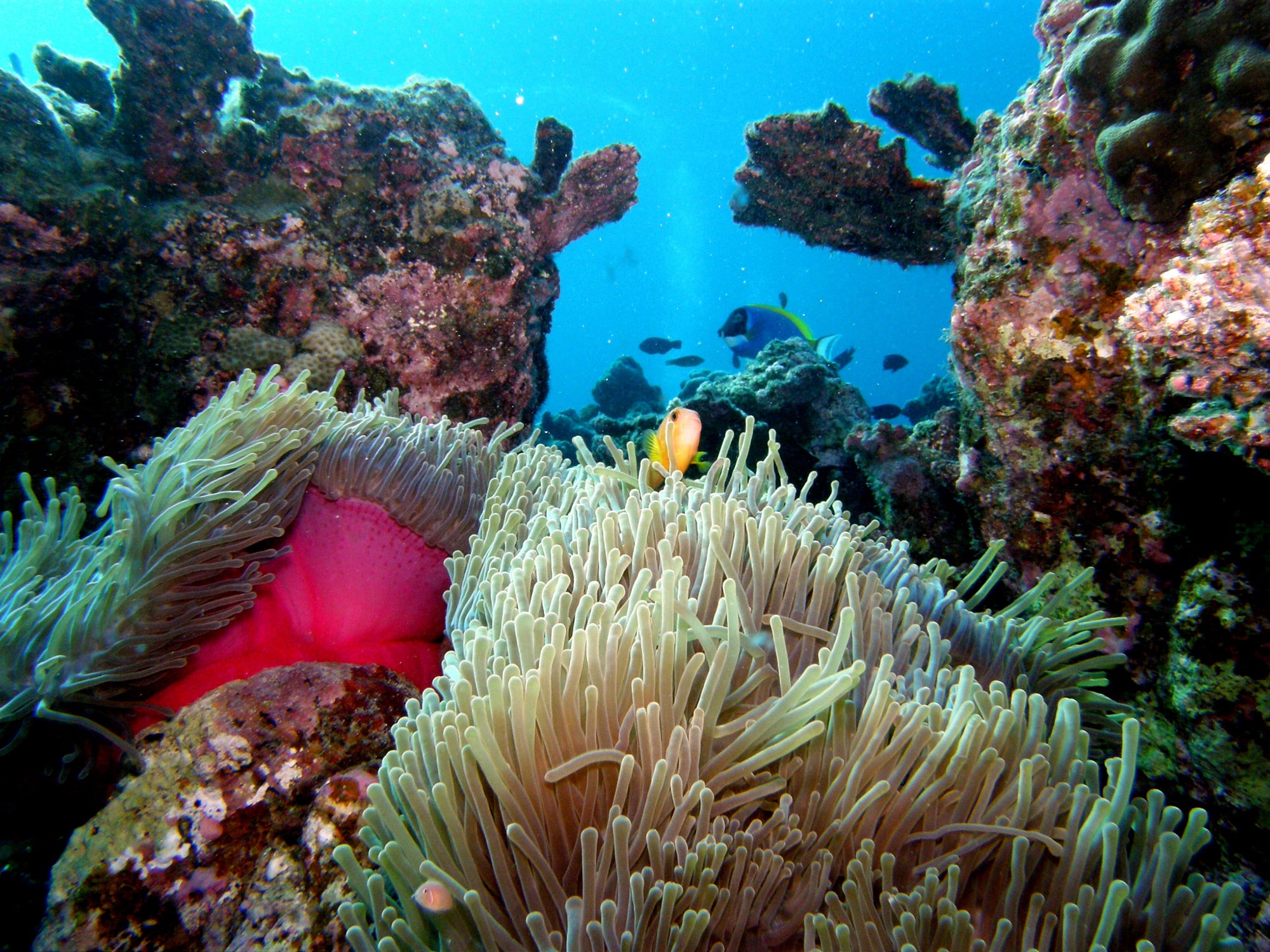
El Catlin Seaview Survey ante todo, una expedición científica importante. Su objetivo es llevar a cabo el primer estudio exhaustivo para documentar la composición y la salud de los arrecifes de coral en la Gran Barrera de Coral Australiana y el Mar del Coral, a través de un rango de profundidad sin precedentes (0-100m) – intentando dar respuesta a una serie de preguntas importantes en relación con los cambios asociados con el rápido calentamiento y la acidificación de los océanos.
Sin embargo, esto no es un estudio científico.
Por lo general, los estudios científicos no tienen la capacidad de capturar realmente la imaginación del público y de involucrar a la gente en la ciencia. Este tipo de expediciones y sus resultados sólo tienden a ser fascinantes para los científicos de otros. Este proyecto es muy diferente. Las imágenes de la expedición, cuando se proyecten juntas, permitirá a los científicos y al público en general explorar el arrecife de forma remota a través de cualquier dispositivo conectado a Internet. Permitirá elegir una ubicación, sumergirse, mirar alrededor y disfrutar de una inmersión virtual. Tiene el potencial de involucrar a la gente con la vida y la ciencia de nuestros océanos de una manera que no ha sido posible hasta ahora. Es un momento muy emocionante.
Wi-Fi Subacuático
Una red inalámbrica para controlar robots submarinos: este es el resultado de un experimento que ha realizado con éxito un grupo de investigación europeo coordinado por Andrea Caiti, del “Piaggio” Centro especializado en robótica de la Universidad de Pisa.
“La comunicación bajo el mar” – explica Andrea Caiti en un comunicado de prensa de la Universidad de Pisa – “es problemática y está condicionada por diversos factores, como la oceanografía local, la temperatura, el contenido salino del agua, y la profundidad. Nuestros robots pueden establecer eficaces redes de comunicación subacuática, que pueden ser utilizadas para crear sistemas de vigilancia en lugares sumergidos con acceso limitado – como zonas marinas protegidas o de interés arqueológico, así como en instalaciones industriales o puertos a lo largo de la costa-, mientras que al mismo tiempo miden parámetros importantes para examinar el estado del medio marino, tales como la temperatura del agua, la salinidad y la contaminación “.
La etapa final del experimento se llevó a cabo en los fiordos noruegos utilizando el robot “Folaga”, que mide 2 metros de longitud, con un diámetro de 12 centímetros y un peso de 30 kilogramos, al cual se le aplicó un sensor de temperatura. Los investigadores pudieron comprobar que el robot, que navega en la zona portuaria ocupada del fiordo, fue capaz de trabajar de forma autónoma, respondiendo a las órdenes enviadas desde la estación central. Es más, al comprobar lo que ocurriría en el caso de una pérdida de conexión, los investigadores encontraron que el robot era capaz de volver a establecer contacto de forma autónoma.
Enlaces
http://www.piaggio.ing.unipi.it/
http://www.piaggio.ing.unipi.it/index.php/research/123-robotics
http://unimap.unipi.it/cercapersone/dettaglio.php?ri=5685&template=dettaglio.tpl
http://www.dsea.unipi.it/Members/caitiw
http://www.ua-net.eu/
Acerca del autor
![]()
Sumérgete en las últimas
historias, antes que nadie.
Suscríbete
al boletín
Alert Diver.