Il progetto Catlin Seaview Survey
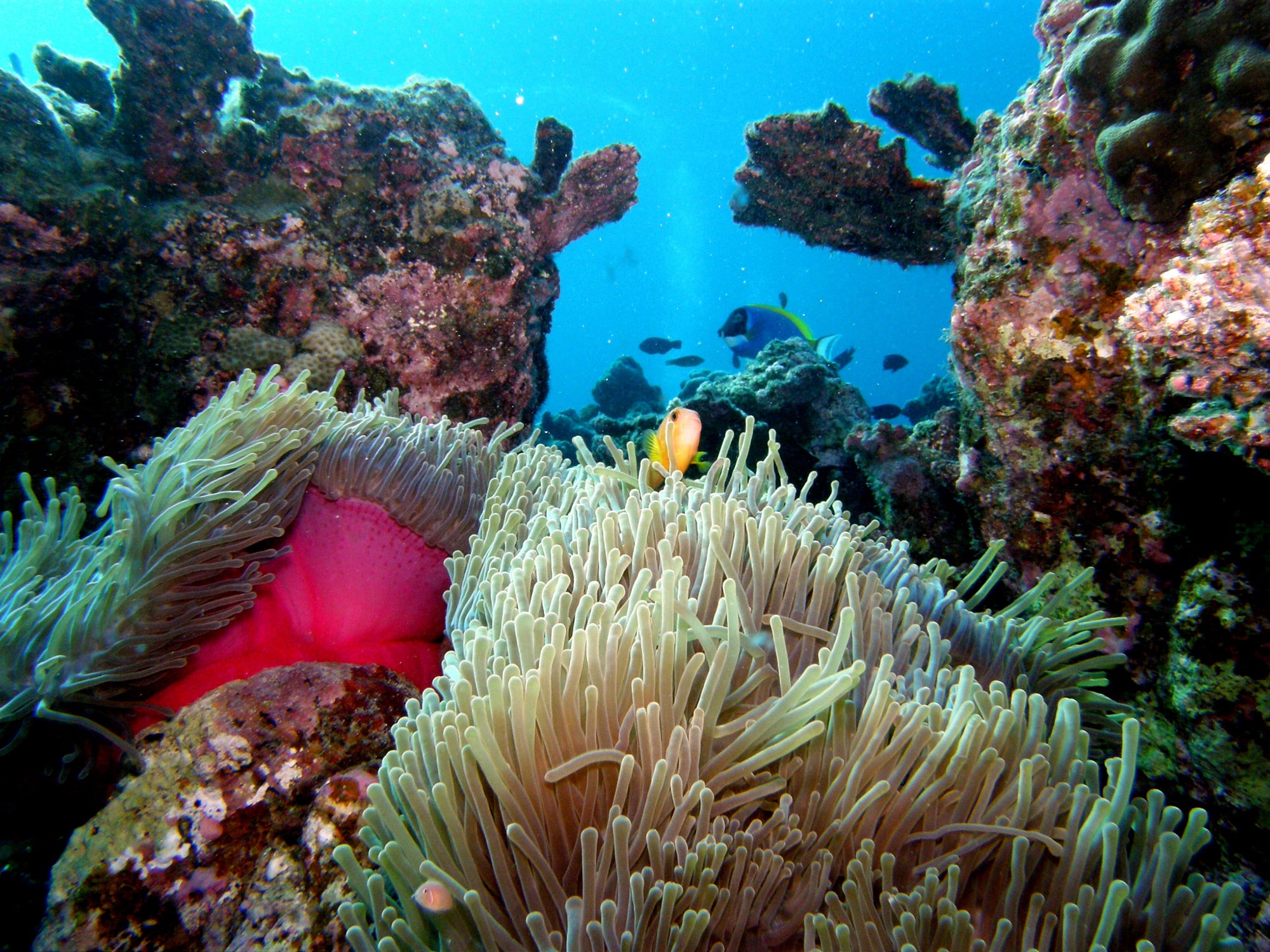
Il progetto Catlin Seaview Survey è prima di tutto un’importante spedizione scientifica. Il suo scopo è realizzare la prima indagine completa che documenti la composizione e lo stato di salute dei reef della Grande Barriera Corallina e del Mar dei Coralli per un’ampiezza di profondità senza precedenti (0-100m), affrontando una serie di importanti questioni che riguardano i cambiamenti associati al rapido riscaldamento e all’acidificazione degli oceani.
Ma non è solo un’altra indagine scientifica.
Di solito gli studi scientifici non sanno catturare veramente l’immaginazione del pubblico e risvegliare l’interesse nella scienza. Spedizioni e scoperte tendono ad essere avvincenti solo per altri scienziati. Questo progetto è molto diverso. Le immagini della spedizione, una volta riunite, permetteranno a scienziati e al pubblico in generale di esplorare la barriera corallina tramite qualsiasi dispositivo collegato ad internet. Chiunque potrà scegliere un percorso, nuotare sott’acqua, guardarsi intorno e partire per un’immersione virtuale. Questo progetto ha il potenziale di rendere partecipi le persone nella vita e nella conoscenza dei nostri oceani in un modo finora impossibile. Stiamo vivendo un momento molto entusiasmante.
Wi-Fi subacqueo
Una rete wireless per controllare robot sottomarini: è questo il risultato dell’esperimento concluso con successo da un gruppo di ricerca europeo coordinato dall’Italia con Andrea Caiti, del centro”Piaggio” specializzato in robotica dell’Università di Pisa.
“La comunicazione sotto la superficie del mare – spiega Caiti in una nota diffusa dall’ateneo pisano – è problematica e condizionata da fattori variabili, come l’oceanografia locale, la temperatura, il grado di salinità dell’acqua e la profondità. I nostri robot sono in grado di costruire reti di comunicazione acustica sottomarina efficaci, che potranno essere utili per realizzare sistemi per la sorveglianza di siti subacquei ad accesso limitato – come quelli delle aree marine protette o di interesse archeologico, di infrastrutture industriali o portuali lungo la costa – e allo stesso tempo capaci di misurare parametri importanti per il controllo dello stato di salute dell’ambiente marino, come temperatura, salinità e inquinamento dell’acqua”.
La prova conclusiva delle sperimentazioni si è svolta nei fiordi della Norvegia, dove è stato utilizzato il robot ‘Folaga’, lungo 2 metri e con un diametro di 12 centimetri e pesante 30 chilogrammi, al quale era stato applicato un sensore di temperatura. I ricercatori hanno potuto verificare che il robot, navigando nella trafficata zona portuale del fiordo, sapeva lavorare in autonomia, rispondere ai comandi inviati dalla stazione centrale e, nel caso simulato di perdita della rete, sapeva reinserirsi nella rete autonomamente.
I Link
http://www.piaggio.ing.unipi.it/
http://www.piaggio.ing.unipi.it/index.php/research/123-robotics
http://unimap.unipi.it/cercapersone/dettaglio.php?ri=5685&template=dettaglio.tpl