Het Catlin Seaview Survey project
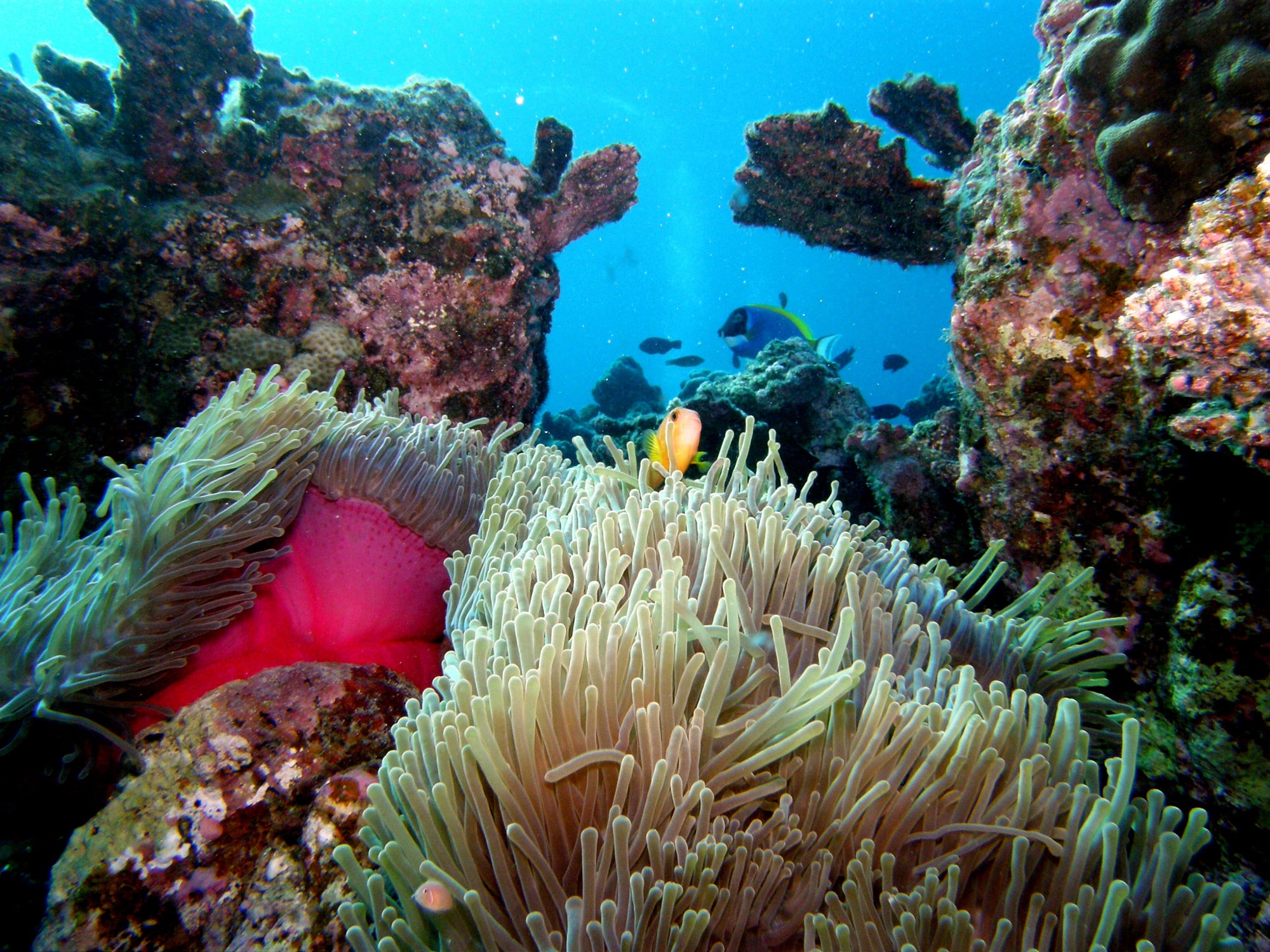
Het Catlin Seaview Survey is bovenal een belangrijke, wetenschappelijke expeditie. Het doel is een eerste, diepgaande studie uit te voeren om de samenstelling en gezondheid van koraalriffen op het Great Barrier Reef en in de Coral Sea vast te leggen over een nooit eerder vertoonde groot dieptebereik (0-100m). Daarbij wordt een reeks belangrijke vragen gesteld betreffende de veranderingen gerelateerd aan de snelle opwarming en verzuring van de oceanen.
Dit is echter niet zo maar weer eens een wetenschappelijke studie.
Gewoonlijk zijn wetenschappelijke studies niet in staat om echt een beroep te doen op het voorstellingsvermogen van het publiek en mensen te betrekken bij de wetenschap. Expedities en hun bevindingen hebben de neiging alleen fascinerend te zijn voor andere wetenschappers. Dit project is heel anders. De beelden van de expeditie zullen, als ze aan elkaar geregen zijn, wetenschappers en het publiek in het algemeen in staat stellen het rif op afstand te exploreren via elk apparaat dat verbinding met het internet heeft. Het geeft hun de mogelijkheid een locatie te kiezen, onderwater te duiken, rond te kijken en een virtuele duik te maken. Het biedt de mogelijkheid om mensen te betrekken bij het leven in en de kennis over onze oceanen op een manier die tot nu toe nog niet mogelijk was. Het is een ontzettend opwindende tijd.
Onderwater Wi-Fi
Een draadloos netwerk om onderwater robots te besturen: dat is het resultaat van een experiment dat met succes uitgevoerd is door een Europese onderzoeksgroep, gecoördineerd door Andrea Caiti, van het “Piaggio”
centrum, gespecialiseerd in robotica aan de Universiteit van Pisa.
“Communicatie onder de zee” – verklaarde Andrea Caiti in een persbericht van de Universiteit van Pisa – “is problematisch en wordt beïnvloed door verschillende factoren, zoals lokale oceanografie, temperatuur, het zoutgehalte van het water en diepte. Onze robots kunnen een doeltreffend onderwater communicatie netwerken bouwen, die gebruikt kunnen worden voor het opzetten van bewakingssystemen voor gebieden onderwater met beperkte toegang – zoals beschermde onderwatergebieden of plaatsen van archeologisch belang, maar ook voor industriële of haven faciliteiten langs de kust – terwijl ze tegelijkertijd belangrijke parameters berekenen die de status van het zeemilieu in kaart brengen, zoals watertemperatuur, zoutgehalte en vervuiling.”
Het laatste stadium van het experiment vond plaats in de Noorse fjorden met gebruikmaking van de robot “Folaga”, die een afmeting heeft van 2 meter in de lengte, met een diameter van 12 centimeter en een gewicht van 30 kilo en waar een temperatuursensor op aangebracht was.
De onderzoekers konden vaststellen dat de robot, navigerend in het drukke havengebied van het fjord, in staat was om zelfstandig te werken reagerend op commando’s die vanuit een centraal punt verzonden werden. Bovendien ontdekten de onderzoekers, toen men testte wat er zou gebeuren in geval van een niet werkende verbinding, dat de robot in staat was om zelfstandig het contact te herstellen.
Links
http://www.piaggio.ing.unipi.it/
http://www.piaggio.ing.unipi.it/index.php/research/123-robotics
http://unimap.unipi.it/cercapersone/dettaglio.php?ri=5685&template=dettaglio.tpl
http://www.dsea.unipi.it/Members/caitiw
http://www.ua-net.eu/